Search Results for author:
Found 9 papers, 1 papers with code
SEABO: A Simple Search-Based Method for Offline Imitation Learning
Offline reinforcement learning (RL) has attracted much attention due to its ability in learning from static offline datasets and eliminating the need of interacting with the environment.

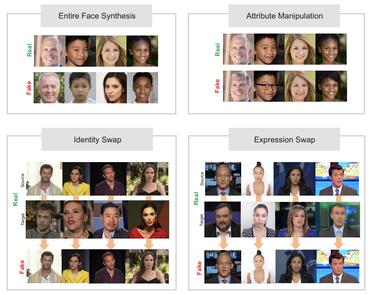
Individualized Deepfake Detection Exploiting Traces Due to Double Neural-Network Operations
This study focuses on the deepfake detection of facial images of individual public figures.

Zero-shot Preference Learning for Offline RL via Optimal Transport
In this paper, we propose a novel zero-shot preference-based RL algorithm that leverages labeled preference data from source tasks to infer labels for target tasks, eliminating the requirement for human queries.
Eventor: An Efficient Event-Based Monocular Multi-View Stereo Accelerator on FPGA Platform
In this paper, Eventor is proposed as a fast and efficient EMVS accelerator by realizing the most critical and time-consuming stages including event back-projection and volumetric ray-counting on FPGA.
Modeling the Nonsmoothness of Modern Neural Networks
Modern neural networks have been successful in many regression-based tasks such as face recognition, facial landmark detection, and image generation.


On Microstructure Estimation Using Flatbed Scanners for Paper Surface Based Authentication
We analytically show that log(EER) is decreasing linearly in the edge length of a paper patch.
RoeNets: Predicting Discontinuity of Hyperbolic Systems from Continuous Data
The ability of our model to predict long-term discontinuity from a short window of continuous training data is in general considered impossible using traditional machine learning approaches.
Efficient Computation Reduction in Bayesian Neural Networks Through Feature Decomposition and Memorization
A feature decomposition and memorization (\texttt{DM}) strategy is utilized to reform the BNN inference flow in a reduced manner.
eSLAM: An Energy-Efficient Accelerator for Real-Time ORB-SLAM on FPGA Platform
Simultaneous Localization and Mapping (SLAM) is a critical task for autonomous navigation.


