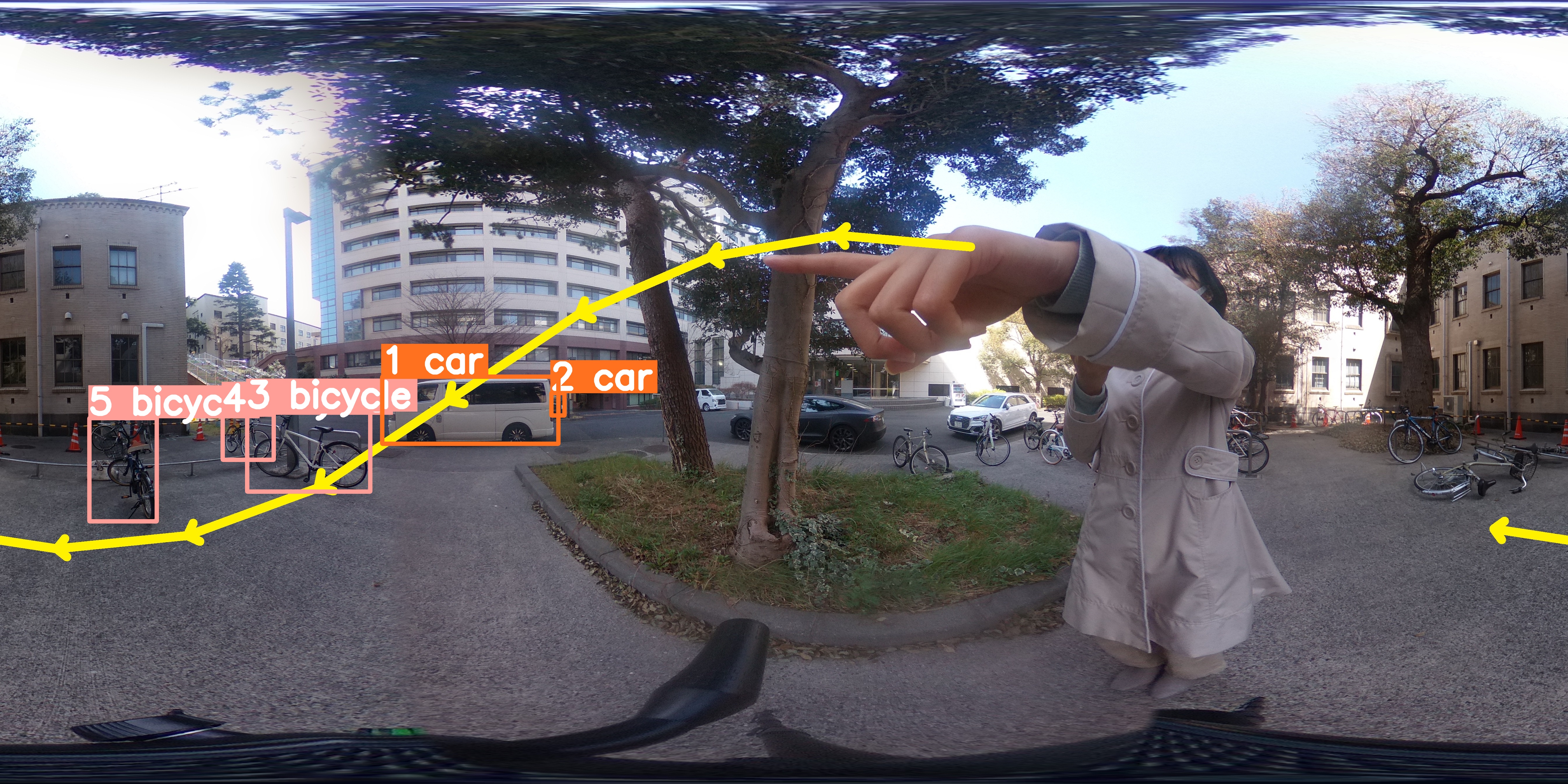
Point Anywhere: Directed Object Estimation from Omnidirectional Images
One of the intuitive instruction methods in robot navigation is a pointing gesture. In this study, we propose a method using an omnidirectional camera to eliminate the user/object position constraint and the left/right constraint of the pointing arm. Although the accuracy of skeleton and object detection is low due to the high distortion of equirectangular images, the proposed method enables highly accurate estimation by repeatedly extracting regions of interest from the equirectangular image and projecting them onto perspective images. Furthermore, we found that training the likelihood of the target object in machine learning further improves the estimation accuracy.
PDF Abstract


Datasets
Add Datasets
introduced or used in this paper
Results from the Paper
Submit
results from this paper
to get state-of-the-art GitHub badges and help the
community compare results to other papers.
Methods
No methods listed for this paper. Add
relevant methods here
