Search Results for author:
Found 8 papers, 4 papers with code
Polyphonic audio event detection: multi-label or multi-class multi-task classification problem?
The network is composed of a backbone subnet and multiple task-specific subnets.


SALSA-Lite: A Fast and Effective Feature for Polyphonic Sound Event Localization and Detection with Microphone Arrays
In this work, we introduce SALSA-Lite, a fast and effective feature for polyphonic SELD using microphone array inputs.
End-to-End Complex-Valued Multidilated Convolutional Neural Network for Joint Acoustic Echo Cancellation and Noise Suppression
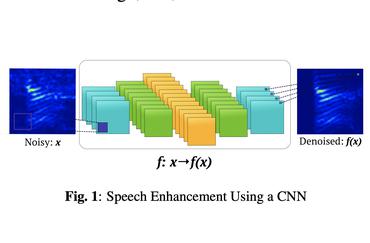
We also propose a dual-mask technique for joint echo and noise suppression with simultaneous speech enhancement.
SALSA: Spatial Cue-Augmented Log-Spectrogram Features for Polyphonic Sound Event Localization and Detection
Sound event localization and detection (SELD) consists of two subtasks, which are sound event detection and direction-of-arrival estimation.

Improving Polyphonic Sound Event Detection on Multichannel Recordings with the Sørensen-Dice Coefficient Loss and Transfer Learning
The S{\o}rensen--Dice Coefficient has recently seen rising popularity as a loss function (also known as Dice loss) due to its robustness in tasks where the number of negative samples significantly exceeds that of positive samples, such as semantic segmentation, natural language processing, and sound event detection.

What Makes Sound Event Localization and Detection Difficult? Insights from Error Analysis
Sound event localization and detection (SELD) is an emerging research topic that aims to unify the tasks of sound event detection and direction-of-arrival estimation.
DCASE 2021 Task 3: Spectrotemporally-aligned Features for Polyphonic Sound Event Localization and Detection
Sound event localization and detection consists of two subtasks which are sound event detection and direction-of-arrival estimation.
AMVNet: Assertion-based Multi-View Fusion Network for LiDAR Semantic Segmentation
In this paper, we present an Assertion-based Multi-View Fusion network (AMVNet) for LiDAR semantic segmentation which aggregates the semantic features of individual projection-based networks using late fusion.
 Ranked #14 on
LIDAR Semantic Segmentation
on nuScenes
Ranked #14 on
LIDAR Semantic Segmentation
on nuScenes

