Search Results for author:
Found 31 papers, 18 papers with code
Self-Supervised Visual Preference Alignment
We generate chosen and rejected responses with regard to the original and augmented image pairs, and conduct preference alignment with direct preference optimization.
 Ranked #34 on
Visual Question Answering
on MM-Vet
Ranked #34 on
Visual Question Answering
on MM-Vet
OneChart: Purify the Chart Structural Extraction via One Auxiliary Token
To address this, we propose OneChart: a reliable agent specifically devised for the structural extraction of chart information.
ShapeLLM: Universal 3D Object Understanding for Embodied Interaction
This paper presents ShapeLLM, the first 3D Multimodal Large Language Model (LLM) designed for embodied interaction, exploring a universal 3D object understanding with 3D point clouds and languages.
 Ranked #1 on
3D Point Cloud Linear Classification
on ModelNet40
Ranked #1 on
3D Point Cloud Linear Classification
on ModelNet40
 3D Object Captioning
3D Point Cloud Linear Classification
+10
3D Object Captioning
3D Point Cloud Linear Classification
+10
Small Language Model Meets with Reinforced Vision Vocabulary
In Vary-toy, we introduce an improved vision vocabulary, allowing the model to not only possess all features of Vary but also gather more generality.
Ranked #81 on
Visual Question Answering
on MM-Vet

Vary: Scaling up the Vision Vocabulary for Large Vision-Language Models
Accordingly, we propose Vary, an efficient and effective method to scale up the vision vocabulary of LVLMs.
Ranked #56 on
Visual Question Answering
on MM-Vet

Merlin:Empowering Multimodal LLMs with Foresight Minds
Then, FIT requires MLLMs to first predict trajectories of related objects and then reason about potential future events based on them.
Ranked #66 on
Visual Question Answering
on MM-Vet
DreamLLM: Synergistic Multimodal Comprehension and Creation
This paper presents DreamLLM, a learning framework that first achieves versatile Multimodal Large Language Models (MLLMs) empowered with frequently overlooked synergy between multimodal comprehension and creation.
 Ranked #2 on
Visual Question Answering
on MMBench
(GPT-3.5 score metric)
Ranked #2 on
Visual Question Answering
on MMBench
(GPT-3.5 score metric)
GroupLane: End-to-End 3D Lane Detection with Channel-wise Grouping
Besides, GroupLane with ResNet18 still surpasses PersFormer by 4. 9% F1 score, while the inference speed is nearly 7x faster and the FLOPs is only 13. 3% of it.

ChatSpot: Bootstrapping Multimodal LLMs via Precise Referring Instruction Tuning
Based on precise referring instruction, we propose ChatSpot, a unified end-to-end multimodal large language model that supports diverse forms of interactivity including mouse clicks, drag-and-drop, and drawing boxes, which provides a more flexible and seamless interactive experience.
GMM: Delving into Gradient Aware and Model Perceive Depth Mining for Monocular 3D Detection
In light of the success of sample mining techniques in 2D object detection, we propose a simple yet effective mining strategy for improving depth perception in 3D object detection.


The 1st-place Solution for CVPR 2023 OpenLane Topology in Autonomous Driving Challenge
We present the 1st-place solution of OpenLane Topology in Autonomous Driving Challenge.

Align-DETR: Improving DETR with Simple IoU-aware BCE loss
We propose a metric, recall of best-regressed samples, to quantitively evaluate the misalignment problem.

BEVStereo++: Accurate Depth Estimation in Multi-view 3D Object Detection via Dynamic Temporal Stereo
Bounded by the inherent ambiguity of depth perception, contemporary multi-view 3D object detection methods fall into the performance bottleneck.
Exploring Recurrent Long-term Temporal Fusion for Multi-view 3D Perception
In this paper, we explore an embarrassingly simple long-term recurrent fusion strategy built upon the LSS-based methods and find it already able to enjoy the merits from both sides, i. e., rich long-term information and efficient fusion pipeline.
Contrast with Reconstruct: Contrastive 3D Representation Learning Guided by Generative Pretraining
This motivates us to learn 3D representations by sharing the merits of both paradigms, which is non-trivial due to the pattern difference between the two paradigms.
![]() Ranked #1 on
Zero-Shot Transfer 3D Point Cloud Classification
on ModelNet10
(using extra training data)
Ranked #1 on
Zero-Shot Transfer 3D Point Cloud Classification
on ModelNet10
(using extra training data)
Autoencoders as Cross-Modal Teachers: Can Pretrained 2D Image Transformers Help 3D Representation Learning?
The success of deep learning heavily relies on large-scale data with comprehensive labels, which is more expensive and time-consuming to fetch in 3D compared to 2D images or natural languages.
 Ranked #5 on
Few-Shot 3D Point Cloud Classification
on ModelNet40 10-way (10-shot)
(using extra training data)
Ranked #5 on
Few-Shot 3D Point Cloud Classification
on ModelNet40 10-way (10-shot)
(using extra training data)
Few-Shot 3D Point Cloud Classification
Knowledge Distillation
+1
MatrixVT: Efficient Multi-Camera to BEV Transformation for 3D Perception
This paper proposes an efficient multi-camera to Bird's-Eye-View (BEV) view transformation method for 3D perception, dubbed MatrixVT.
 Ranked #2 on
Bird's-Eye View Semantic Segmentation
on nuScenes
(IoU lane - 224x480 - 100x100 at 0.5 metric)
Ranked #2 on
Bird's-Eye View Semantic Segmentation
on nuScenes
(IoU lane - 224x480 - 100x100 at 0.5 metric)
Towards 3D Object Detection with 2D Supervision
We propose a temporal 2D transformation to bridge the 3D predictions with temporal 2D labels.
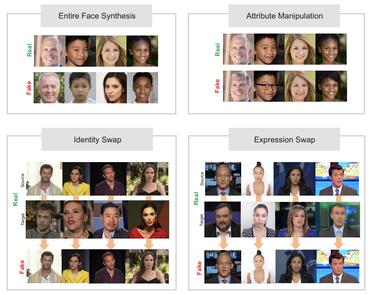
Implicit Identity Leakage: The Stumbling Block to Improving Deepfake Detection Generalization
In this paper, we analyse the generalization ability of binary classifiers for the task of deepfake detection.

BEVStereo: Enhancing Depth Estimation in Multi-view 3D Object Detection with Dynamic Temporal Stereo
To this end, we introduce an effective temporal stereo method to dynamically select the scale of matching candidates, enable to significantly reduce computation overhead.
 Ranked #11 on
3D Object Detection
on nuScenes Camera Only
Ranked #11 on
3D Object Detection
on nuScenes Camera Only
STS: Surround-view Temporal Stereo for Multi-view 3D Detection
Instead of using a sole monocular depth method, in this work, we propose a novel Surround-view Temporal Stereo (STS) technique that leverages the geometry correspondence between frames across time to facilitate accurate depth learning.
PersDet: Monocular 3D Detection in Perspective Bird's-Eye-View
To address this problem, we revisit the generation of BEV representation and propose detecting objects in perspective BEV -- a new BEV representation that does not require feature sampling.
Dense Teacher: Dense Pseudo-Labels for Semi-supervised Object Detection
To date, the most powerful semi-supervised object detectors (SS-OD) are based on pseudo-boxes, which need a sequence of post-processing with fine-tuned hyper-parameters.

BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection
In this research, we propose a new 3D object detector with a trustworthy depth estimation, dubbed BEVDepth, for camera-based Bird's-Eye-View (BEV) 3D object detection.
 Ranked #4 on
3D Object Detection
on Rope3D
Ranked #4 on
3D Object Detection
on Rope3D
Workshop on Autonomous Driving at CVPR 2021: Technical Report for Streaming Perception Challenge
In this report, we introduce our real-time 2D object detection system for the realistic autonomous driving scenario.
YOLOX: Exceeding YOLO Series in 2021
In this report, we present some experienced improvements to YOLO series, forming a new high-performance detector -- YOLOX.
 Ranked #1 on
Real-Time Object Detection
on Argoverse-HD (Detection-Only, Val)
(using extra training data)
Ranked #1 on
Real-Time Object Detection
on Argoverse-HD (Detection-Only, Val)
(using extra training data)

OTA: Optimal Transport Assignment for Object Detection
Recent advances in label assignment in object detection mainly seek to independently define positive/negative training samples for each ground-truth (gt) object.
 Ranked #73 on
Object Detection
on COCO test-dev
Ranked #73 on
Object Detection
on COCO test-dev
LLA: Loss-aware Label Assignment for Dense Pedestrian Detection
A joint loss is then defined as the weighted summation of cls and reg losses as the assigning indicator.
Delving into the Imbalance of Positive Proposals in Two-stage Object Detection
The first imbalance lies in the large number of low-quality RPN proposals, which makes the R-CNN module (i. e., post-classification layers) become highly biased towards the negative proposals in the early training stage.
NMS by Representative Region: Towards Crowded Pedestrian Detection by Proposal Pairing
To acquire the visible parts, a novel Paired-Box Model (PBM) is proposed to simultaneously predict the full and visible boxes of a pedestrian.

PS-RCNN: Detecting Secondary Human Instances in a Crowd via Primary Object Suppression
PS-RCNN first detects slightly/none occluded objects by an R-CNN module (referred as P-RCNN), and then suppress the detected instances by human-shaped masks so that the features of heavily occluded instances can stand out.
 Ranked #2 on
Object Detection
on WiderPerson
Ranked #2 on
Object Detection
on WiderPerson
